







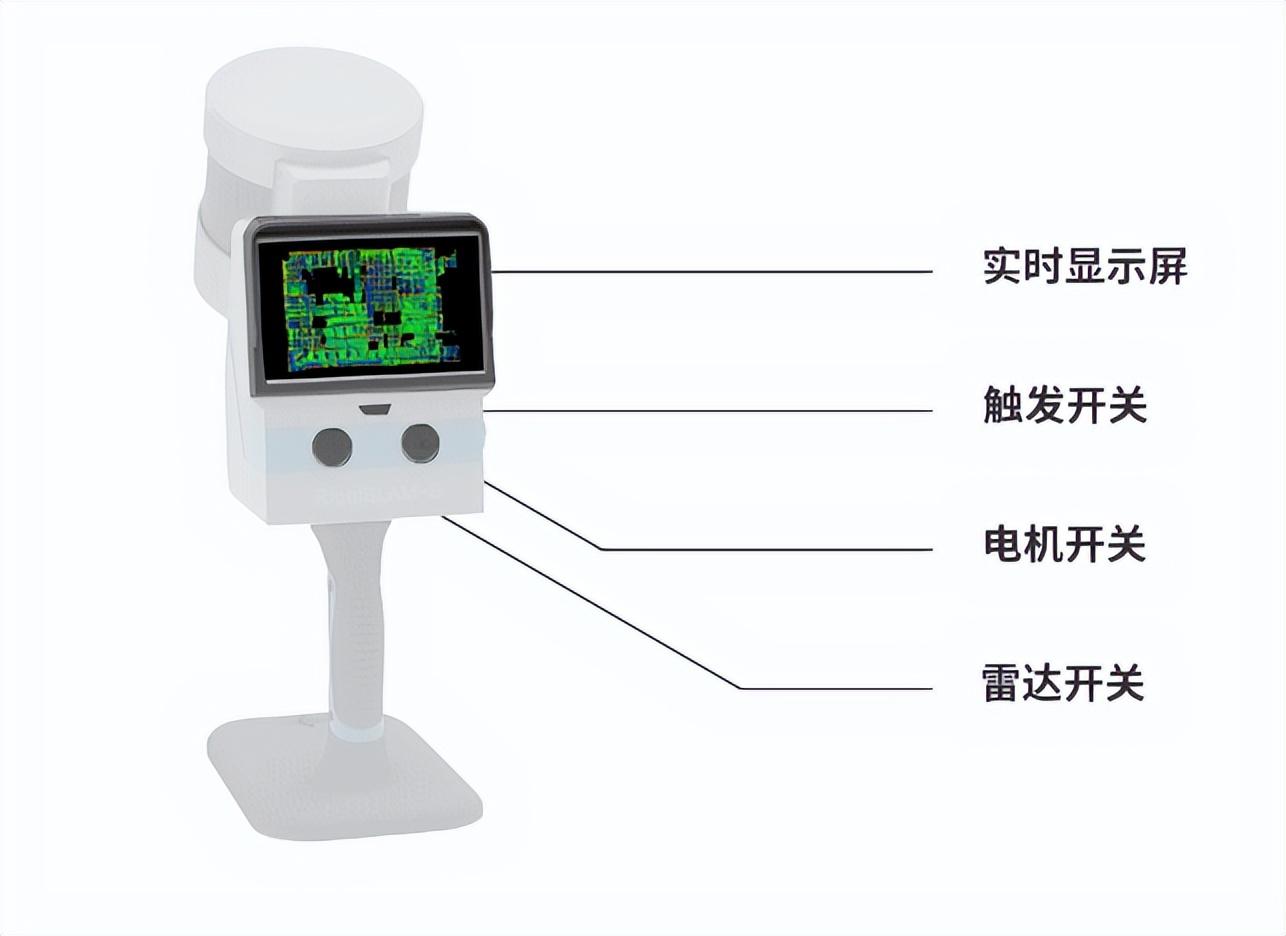
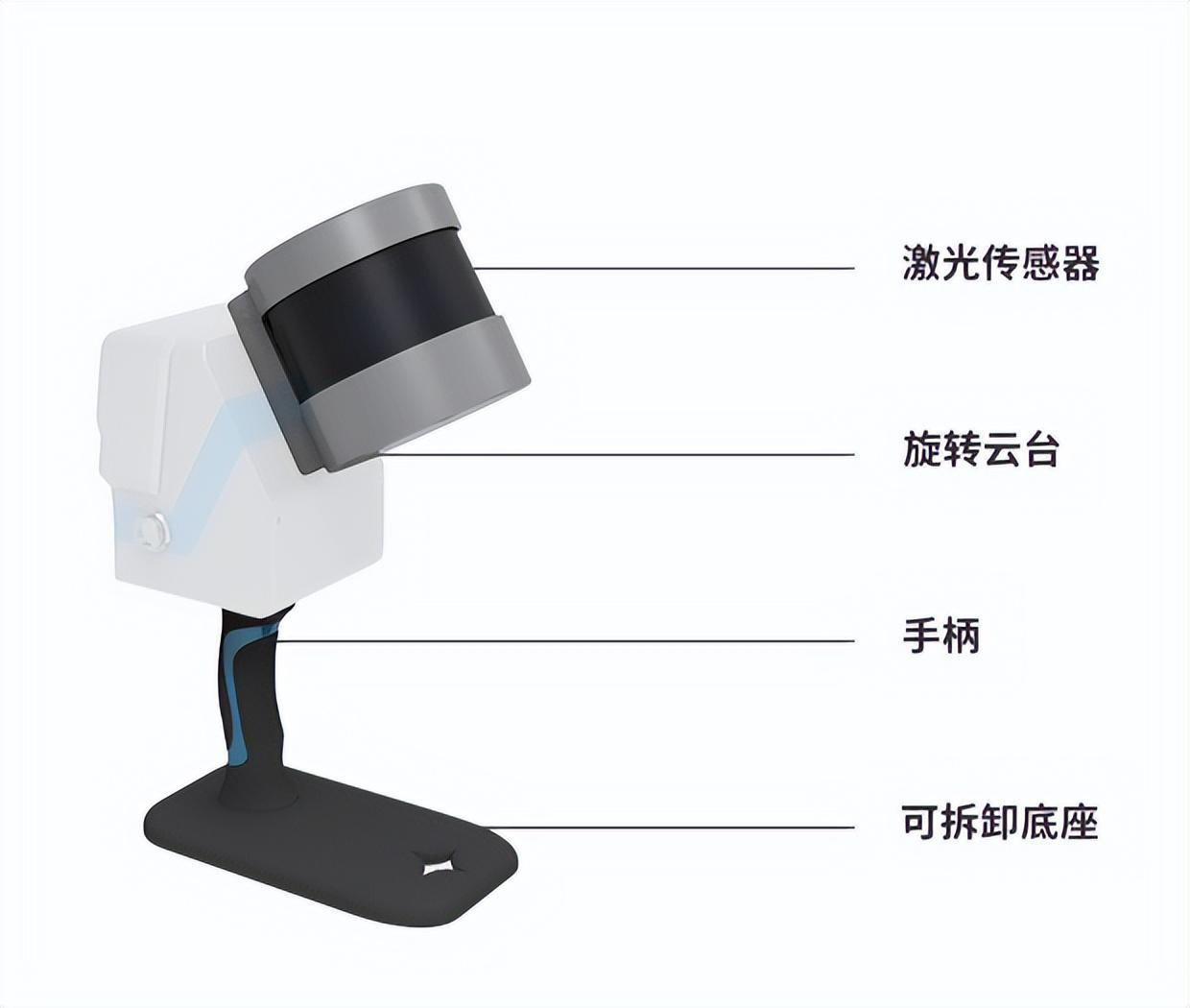
一、前言:SLAM即时定位与地图构建,从行动中获取三维扫描模型
大空间手持3D扫描仪RigelSLAM
二、大空间手持3D扫描仪/RigelSLAM /
RigelSLAM大空间手持3D扫描仪,高精度,自由移动,实时建图,超高角度,耐候性强,高效管理。
大空间手持3D扫描仪RigelSLAM
大空间手持3D扫描仪RigelSLAM

大空间手持3D扫描仪RigelSLAM
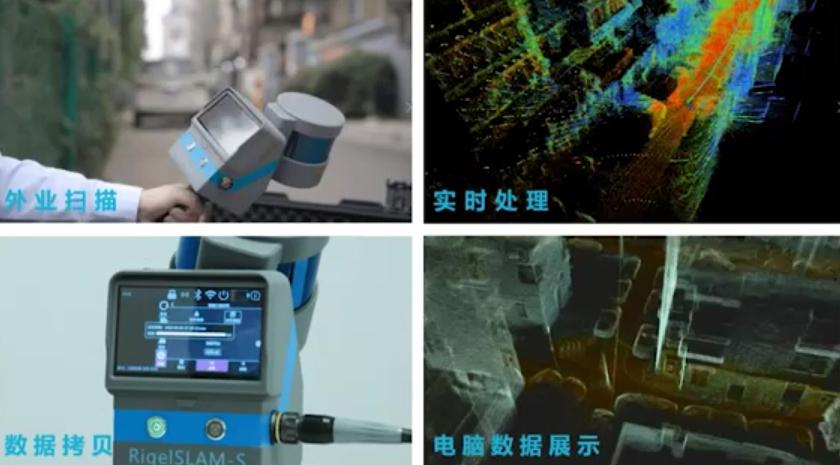
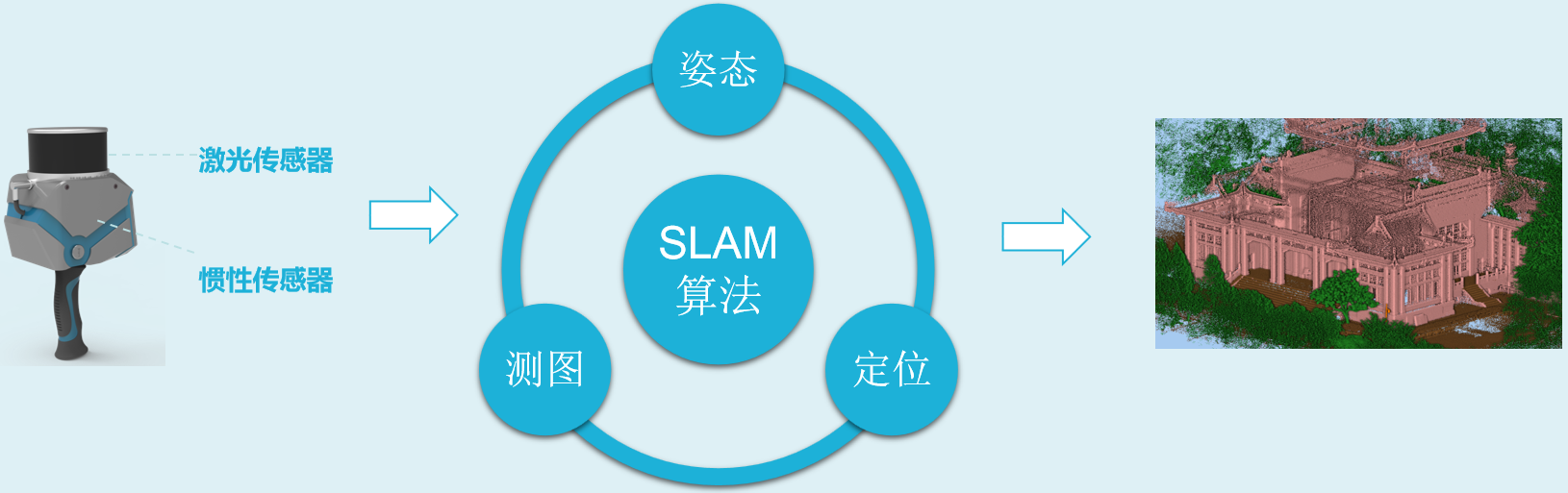
△真正的SLAM算法,实时解算
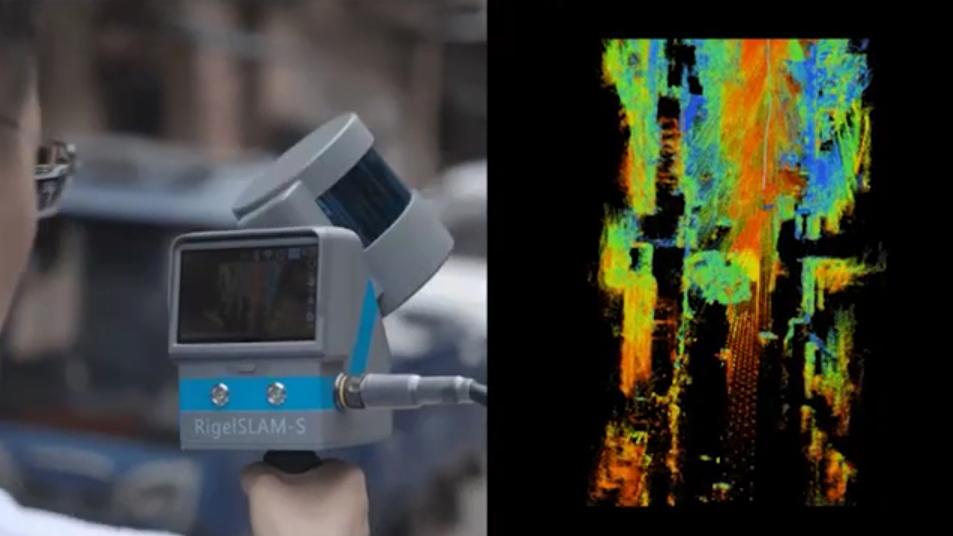
△自带高清屏幕,随时掌握扫描情况

△高精度惯导系统,楼梯隧道简单容易
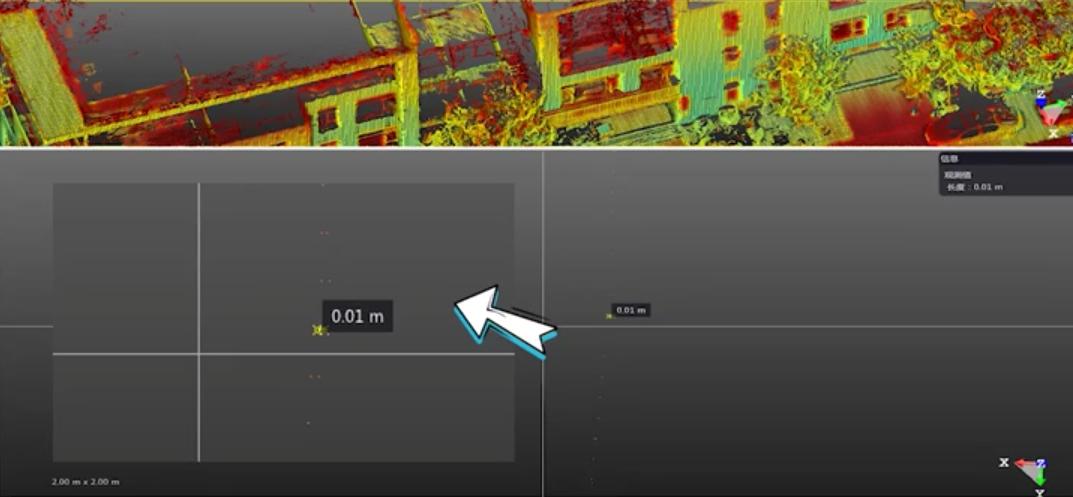
△点云优化算法,厚度1cm
断点续扫:扫描完一片区域A之后,在扫描相邻区域B的时候开启断点续描功能;AB区域的扫描点云导入软件就是高度重合的,为后期拼接解决了很多问题
三、RigelSLAM:大开视界·精微捕获-立面测量-老旧城区改造
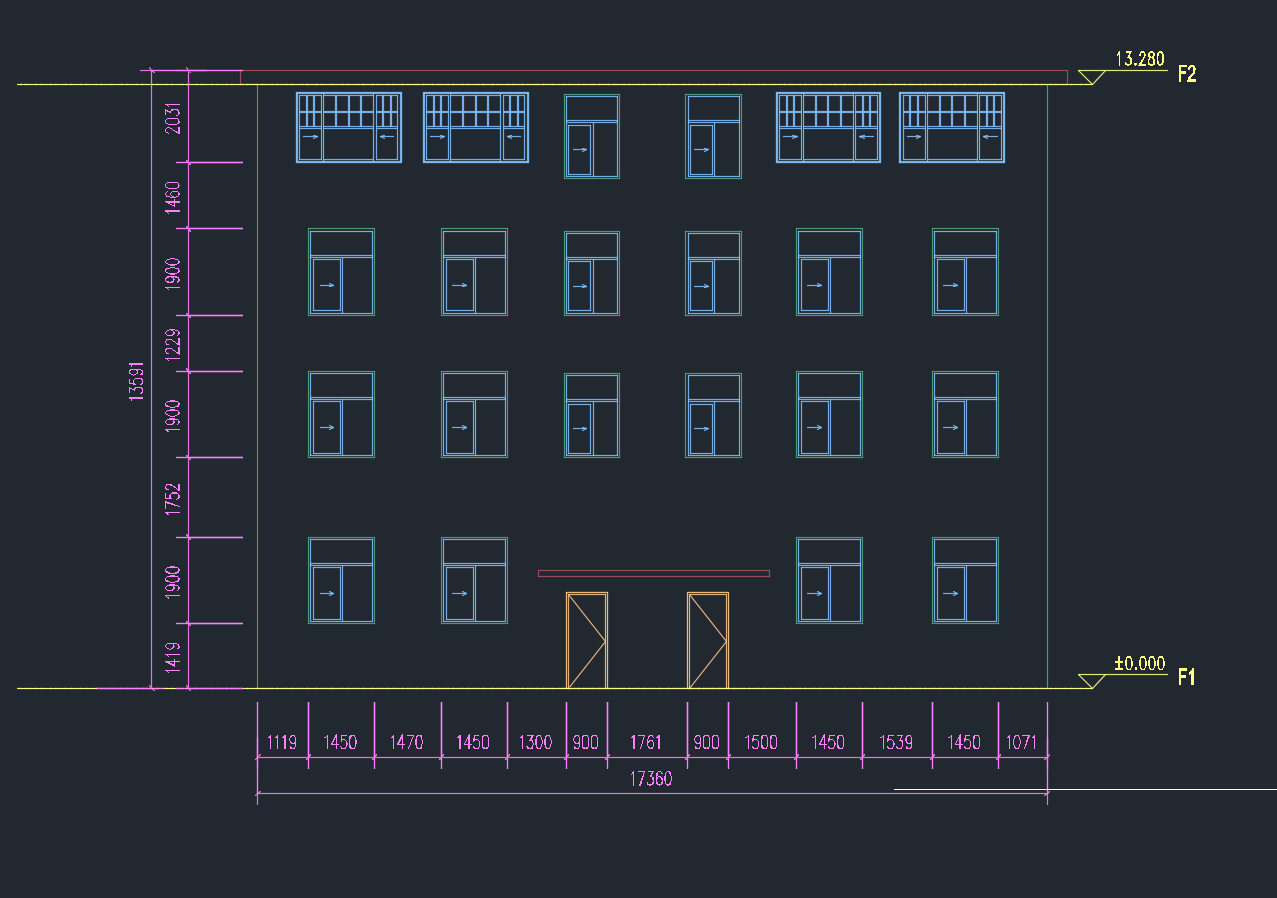
△立面图成果展示
四、林业测量


△输出报告
五、更多三维扫描应用

△公园三维扫描

△隧道三维扫描
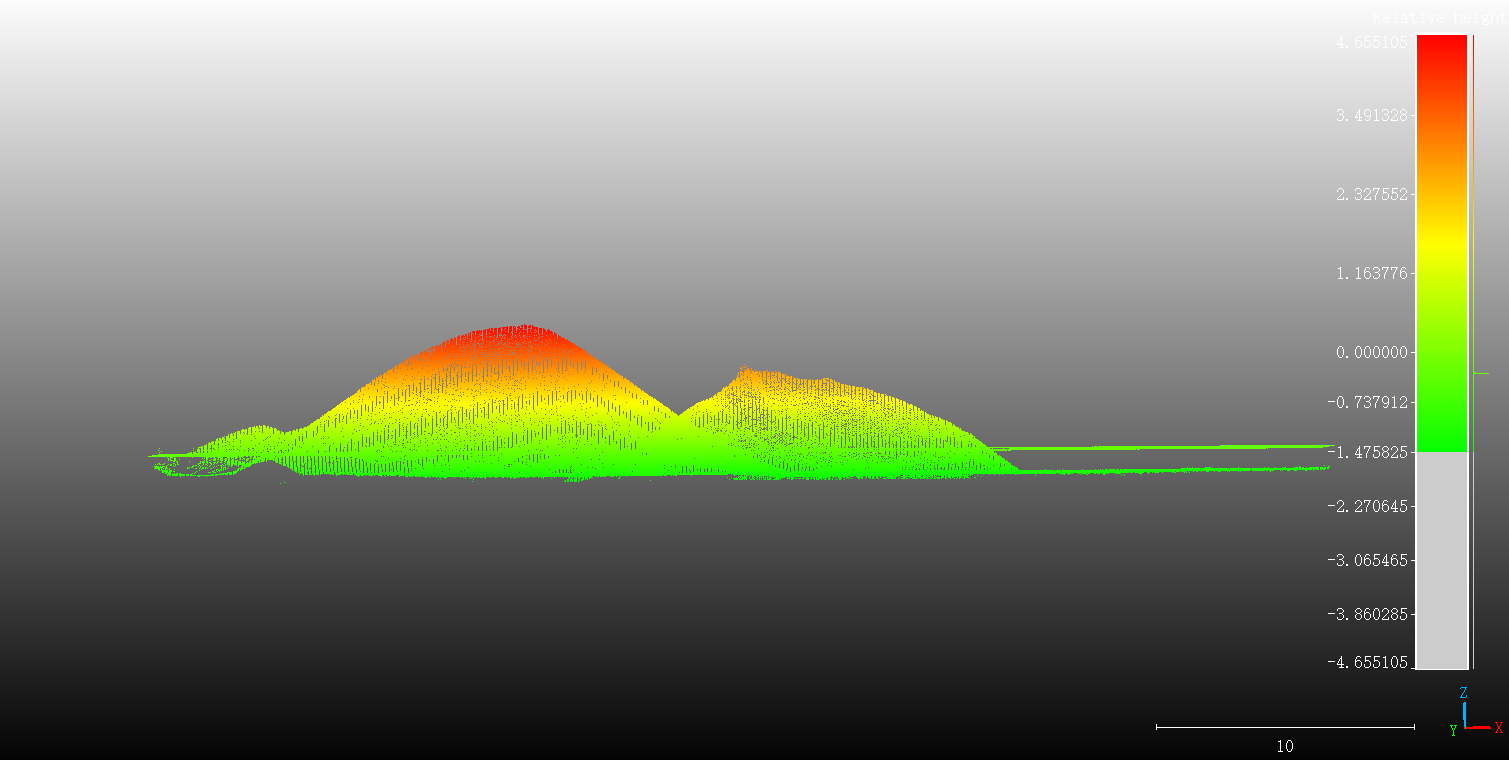
△料堆体积计算